器,当然操控柜与机器人本体间的衔接线缆也是必不行少的。通常在出厂装备时会配有一根5米的衔接线缆,也可以精确的经过现场的实践的需求来进行选配。
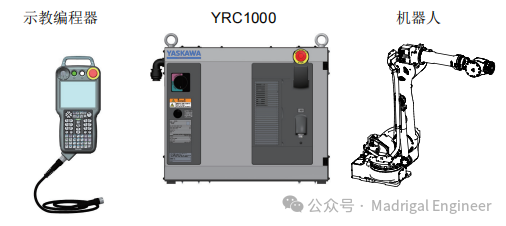
--机器人本体各部分所组成:由图可知安川6轴工业机器人可分为机器人底座、S头、L臂、U臂、手腕法兰盘,对应一到六轴别离称为S轴、L轴、U轴、R轴、B轴、T轴。
--先运用一字刀将开关正下方的门锁顺时针旋转,在开关置于OFF档时即可将操控柜门翻开,牢记不行强行摆开,防止损害机器人操控柜。
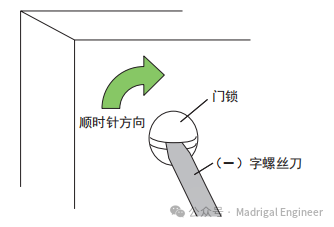
--随后在操控柜内部的左上方即可看到主电源的断路器,在将盖子取下后即可进行线)。在衔接完成后将盖子复位即可。随后在关上柜门后将门锁逆时针旋转即可。

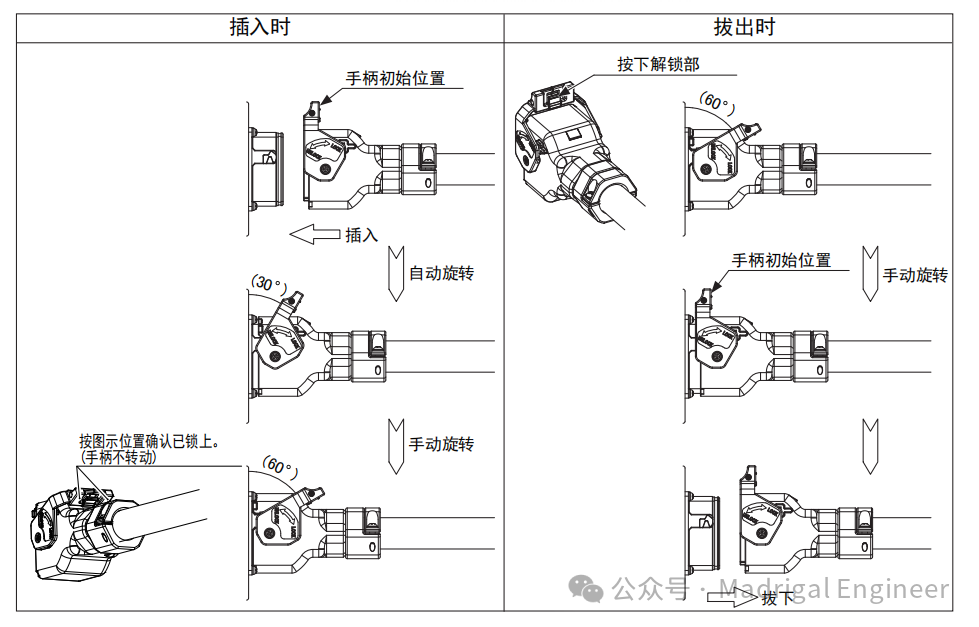
--接下来带我们探究一下操控柜与机器人本体线缆的衔接,由出厂装备的线缆与操控柜后方的接口和机器人本体后方的接口进行衔接,要注意每个接口上都有对应的标识,一定要承认好之后再进行衔接。
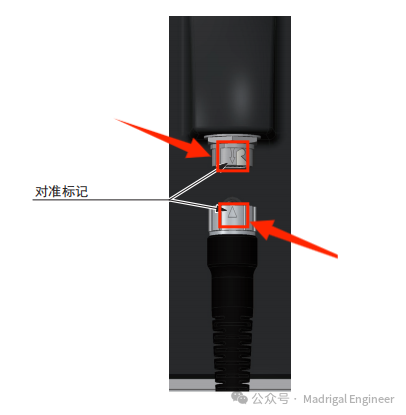
--在承认好对应接口无误后即可进行衔接,先将手柄康复到初始方位,对齐刺进后手柄会主动落下30°,随后再将手柄按压下,不会再滚动即可。拔下插头是需求先将手柄康复至初始方位,再将接口拔出即可。
--最终一步示教器线缆的衔接,是将示教器的接口与操控柜门右下方的衔接器接上,对准符号,刺进即可。
文章出处:【微信号:指南车机器人科技,微信大众号:指南车机器人科技】欢迎增加重视!文章转载请注明出处。
一般由主构架(手臂)、手腕、驱动体系、丈量体系、操控器及传感器等组成。 1图是
运转过程中忽然按下示教器上中止按钮时然程序指针调到程序第一步(NOP步)履行程序该怎样编写?
是归纳了计算机、操控论、机构学、信息和传感技能、人工智能、仿生学等多学科而
负载才能为165 公斤(有用东西负载,实践各关节力气更大),操作不小心会引起严峻安全事故,或许会引起人员受伤或逝世。现场示教时,严控速度示教
及概念 /
修理手册免费下载 /
【RA-Eco-RA4E2-64PIN-V1.0开发板试用】4、Amazon FreeRTOS初探,第一个程序
求助一下关于51系列单片机的Timer0的计时问题,TH0、TL0+1的时刻是怎样算的?
飞凌嵌入式ElfBoard ELF 1板卡-mfgtools烧录流程介绍之烧写所需镜像
【RA-Eco-RA4E2-64PIN-V1.0开发板试用】开箱+Keil环境建立+点灯+点亮OLED


